Vormveranderende wielen geïnspireerd door de oppervlaktespanning van vloeistoffen kunnen een revolutie teweegbrengen in terreinnavigatie

Onderzoekers van Korea Institute of Machinery and Materials hebben een next-gen wielsysteem ontwikkeld dat zijn stijfheid in real-time aanpast, geïnspireerd door de oppervlaktespanningseigenschappen van vloeistofdruppels - waardoor het een uniek ontwerp is. Het biedt een veelbelovende oplossing voor de al lang bestaande uitdaging om snelheid en obstakelnavigatie in balans te brengen in robot- en transportsystemen.
Het concept van wielen met variabele stijfheid en adaptieve mobiliteitssystemen is niet echt nieuw, vooral niet in robotica- en voertuigtoepassingen. Wat deze technologie echter uniek maakt, is het specifieke, op oppervlaktespanning geïnspireerde mechanisme waarmee de stijfheid en vorm van het wiel in realtime kunnen worden aangepast.
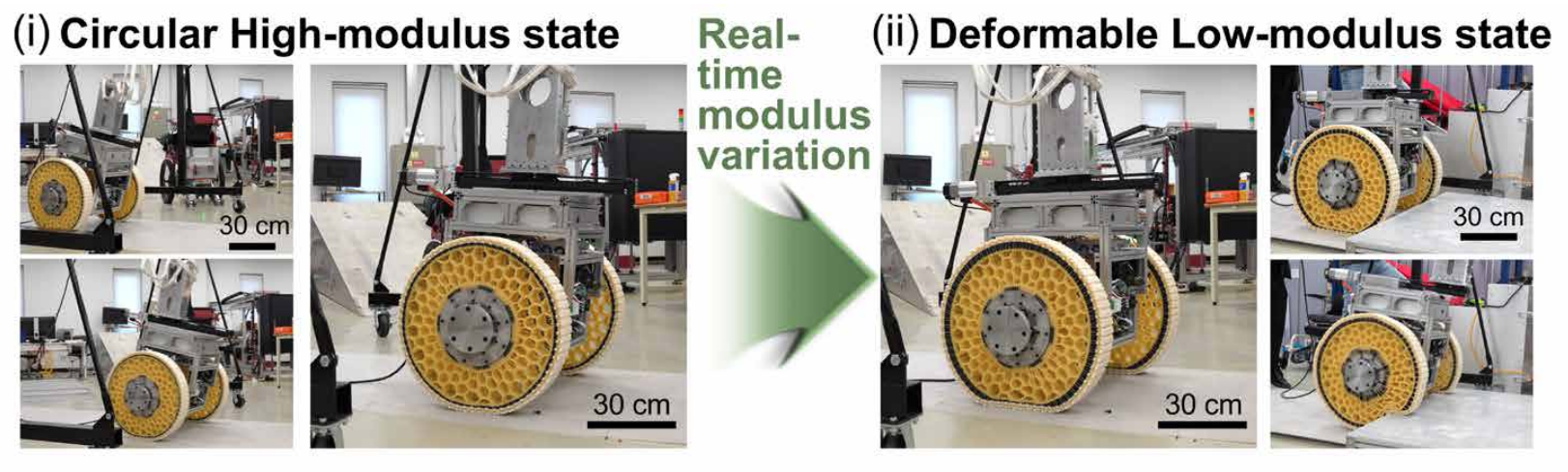
Traditionele wielen zijn efficiënt op vlakke oppervlakken, maar hebben moeite met obstakels, wat vaak leidt tot een afweging tussen mobiliteit en stabiliteit. Om hier iets aan te doen, ontwierp het team een "wiel met variabele stijfheid" dat kan wisselen tussen een stijve, cirkelvormige vorm om met hoge snelheid te bewegen en een zachte, vervormbare vorm om over ruw terrein te navigeren.
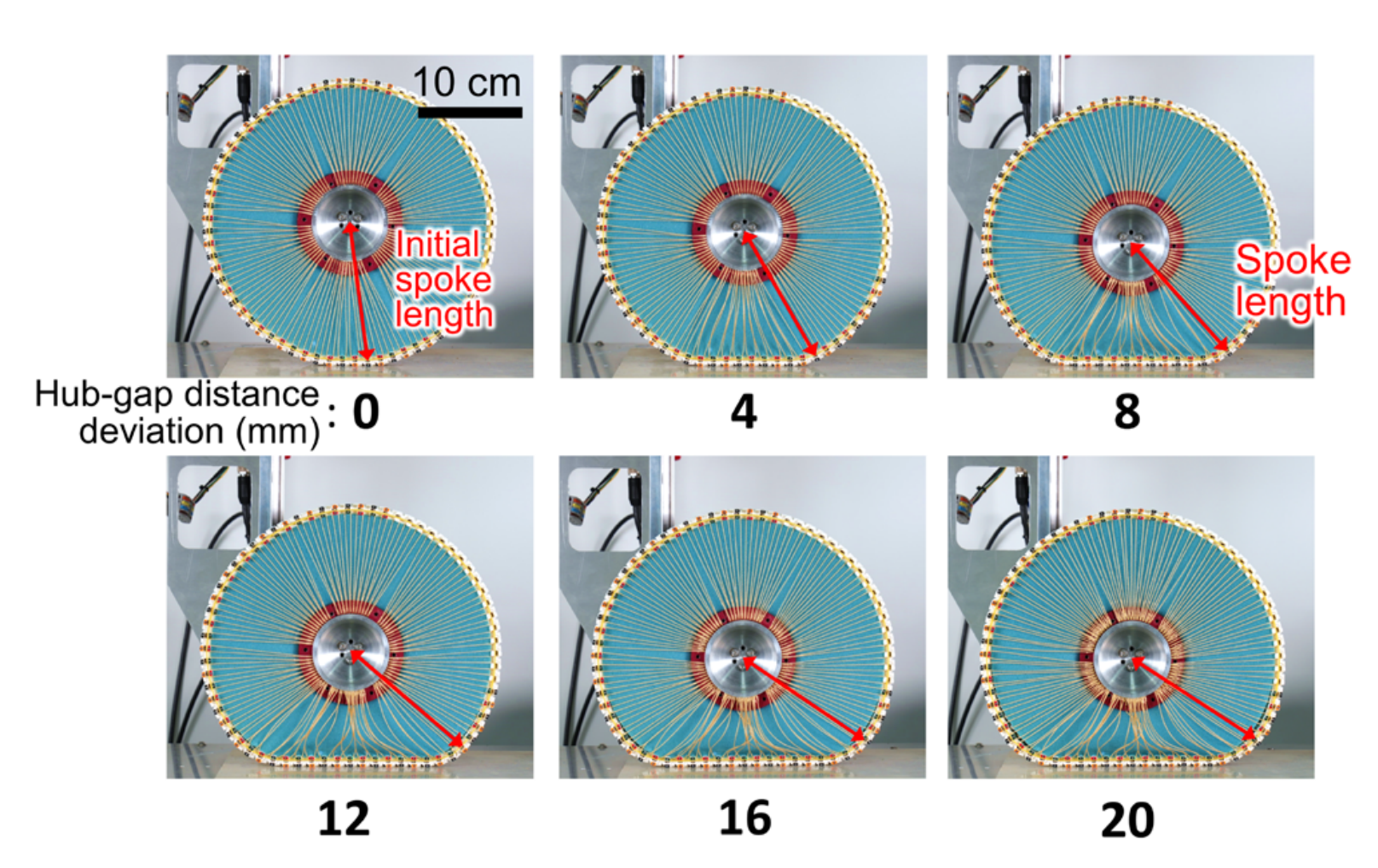
Door de spanning in draadspaken aan te passen die verbonden zijn met een slimme kettingstructuur rond het wiel, kunnen de stijfheid en vorm van het wiel geregeld worden. Hierdoor kan het wiel zijn vorm behouden op gladde oppervlakken en vervormen om zich aan te passen aan obstakels. Het is net zoals oppervlaktespanning een vloeistofdruppel terug naar zijn ronde vorm trekt.
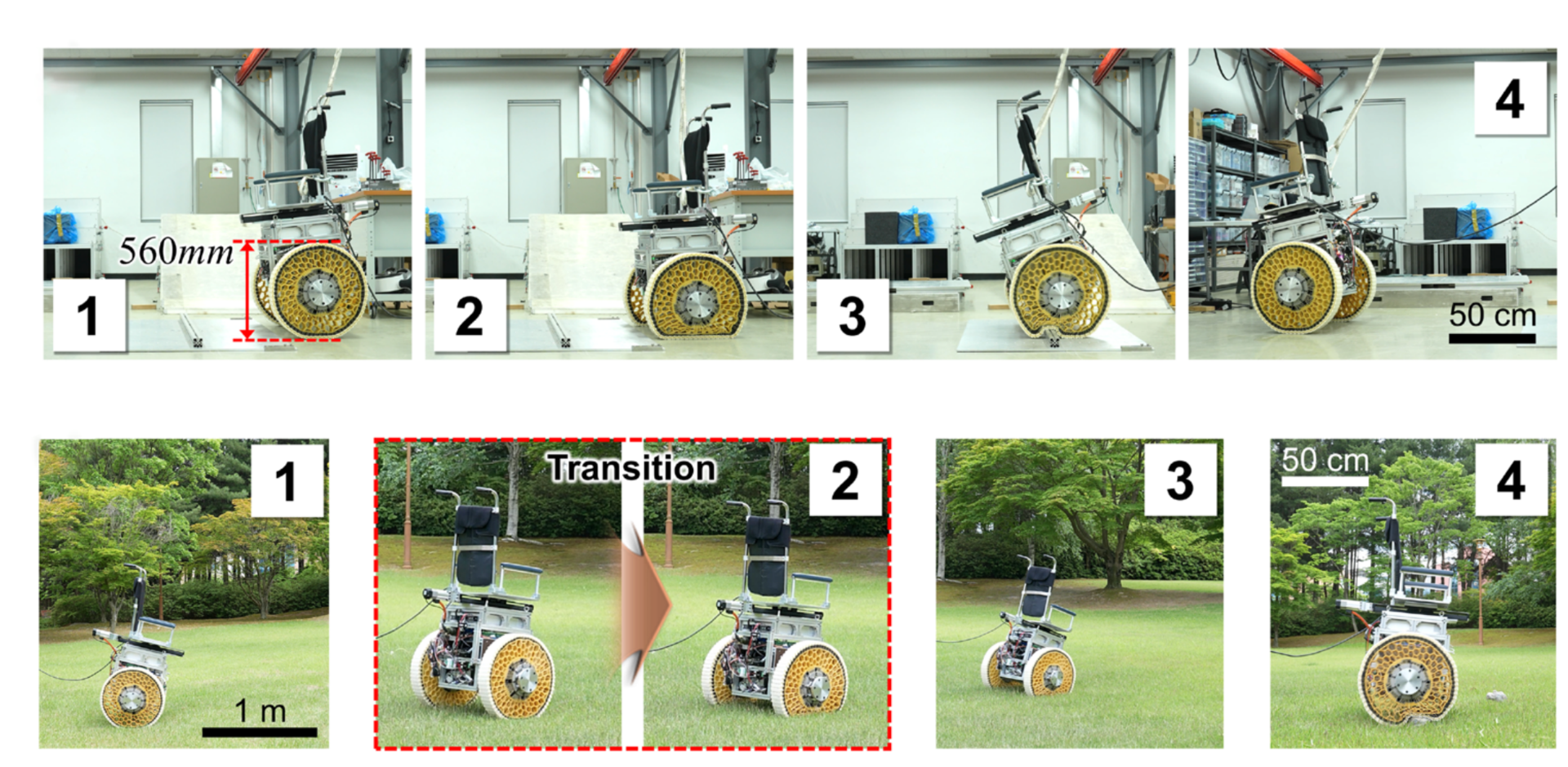
Tests met een rolstoelsysteem met twee wielen toonden aan dat het wiel in real-time tussen verschillende toestanden kan schakelen, waardoor het over obstakels tot 40% van zijn radius kan klimmen. Dit is al een hele verbetering ten opzichte van traditionele wielen en biedt potentiële toepassingen in verschillende mobiele systemen, waaronder robotica en voertuigen.
In het onderzoeksverslag worden ook toekomstige verbeteringen genoemd, zoals het verbeteren van de duurzaamheid van het wiel en de integratie ervan in complexere systemen. Alles bij elkaar zou dit wiel een solide upgrade kunnen zijn voor de manier waarop robots en voertuigen door moeilijke omgevingen navigeren. Het zou bijvoorbeeld de mobiliteit van terreinrobots kunnen verbeteren, waardoor ze beter geschikt worden voor zoek- en reddingsmissies in rampgebieden. Het zou ook de prestaties van off-road voertuigen en rolstoelen kunnen verbeteren, zodat ze oneffen oppervlakken en obstakels met meer gemak en stabiliteit kunnen doorkruisen.
Bron(nen)

